本文由 365源码网 – 18522379162 发布,转载请注明出处,如有问题请联系我们!七度自由建模+分布式四轮独立驱动汽车稳定性控制,MPC模型预

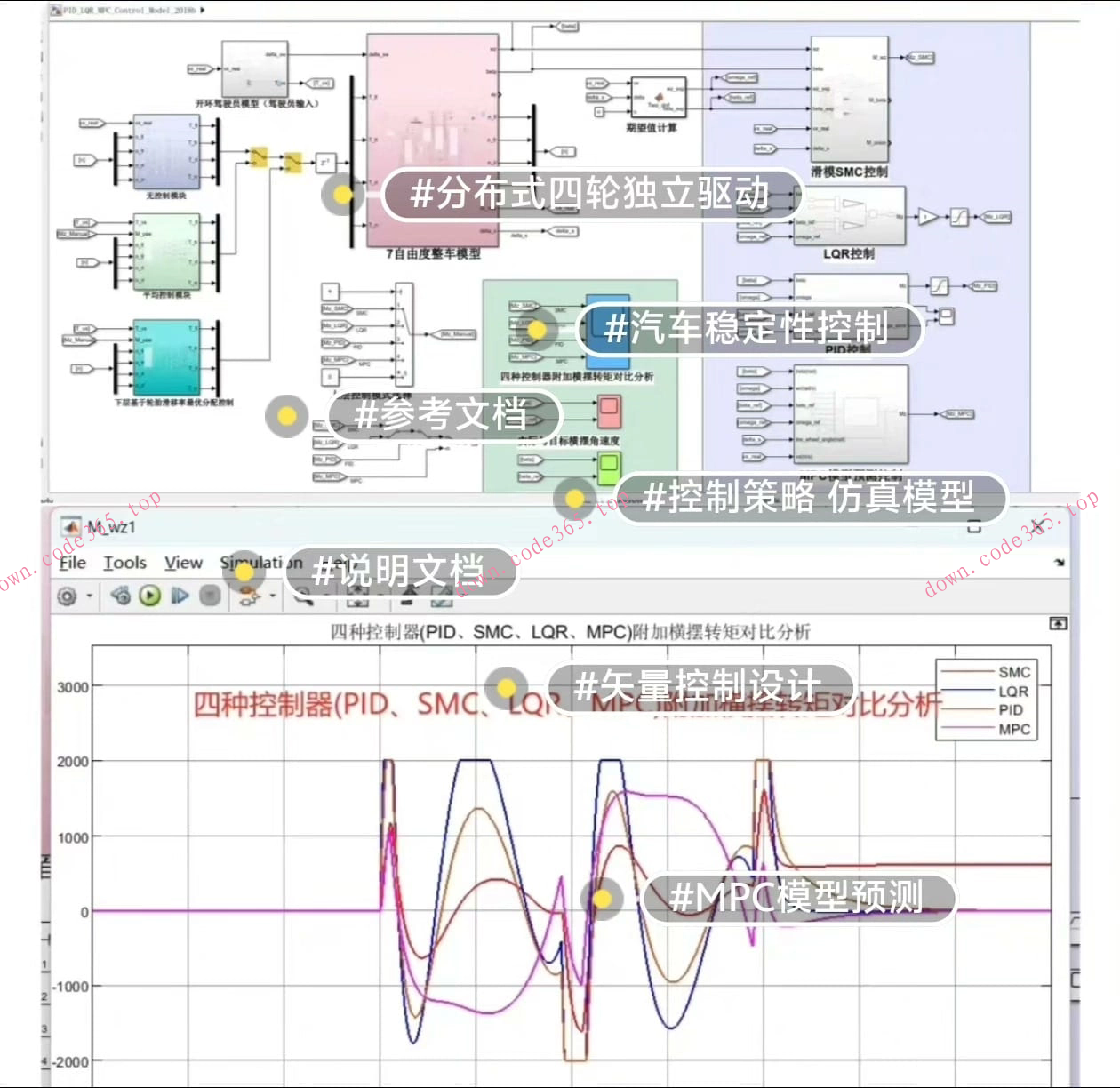
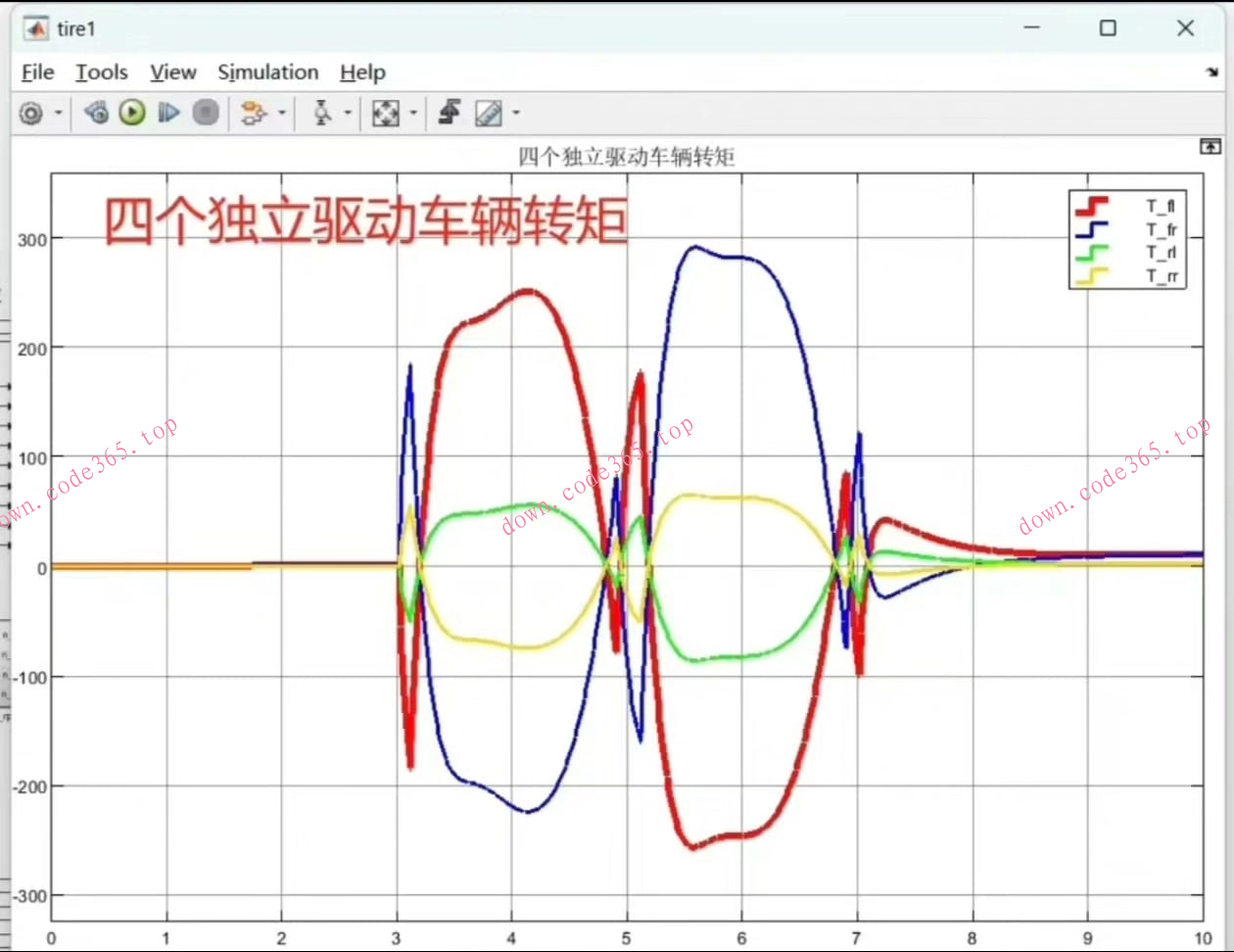
七度自由建模+分布式四轮独立驱动汽车稳定性控制,MPC模型预测,控制策略,矢量控制,附带说明文档,参考文献和仿真模型
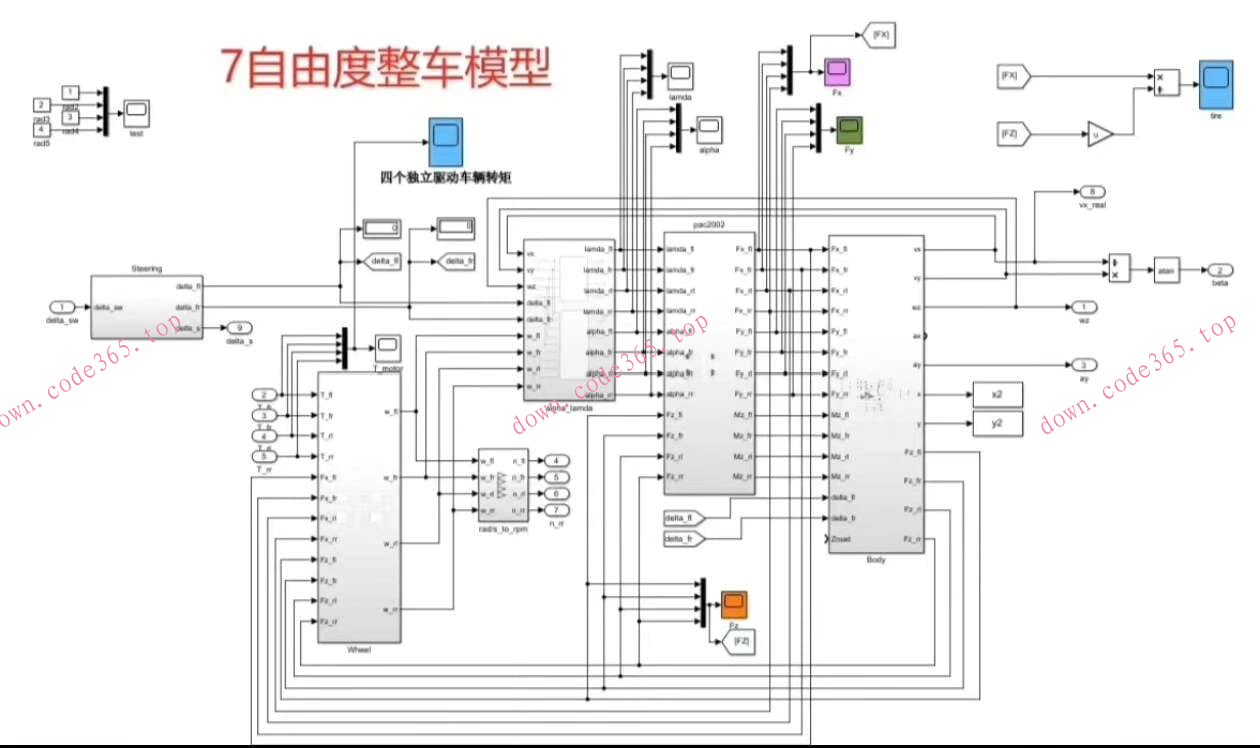
1. 车辆动力学模型:
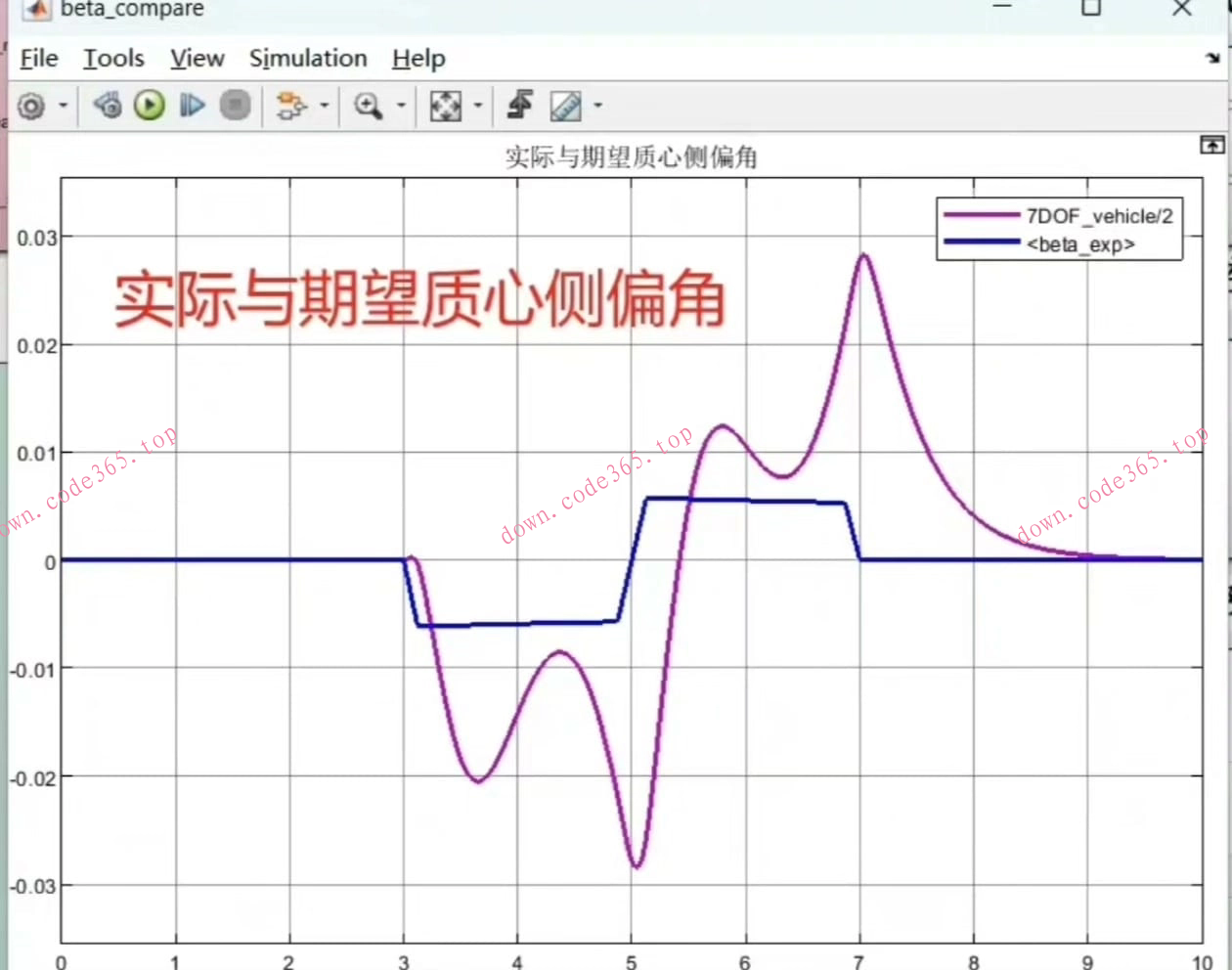
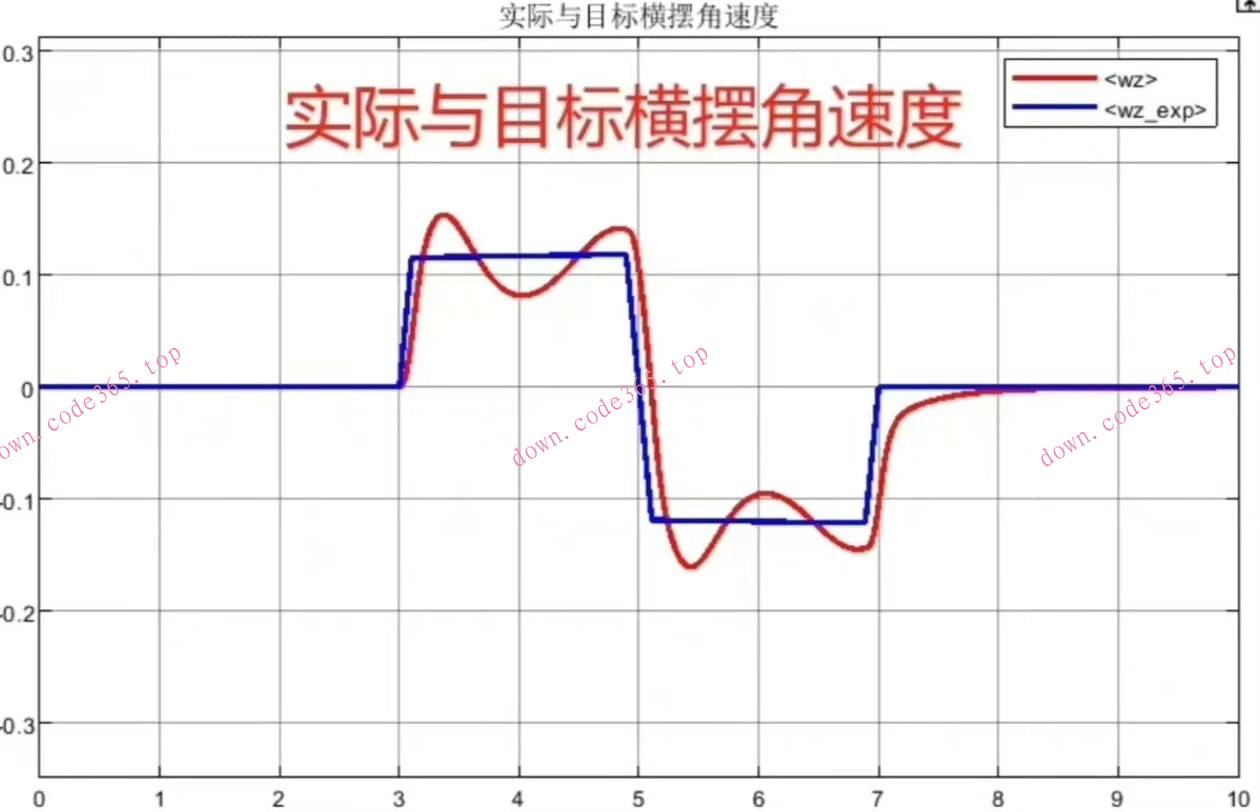
①七自由度整车模型:车辆被控对象采用七自由度整车模型,输出实际质心侧偏角和横摆角速度
②二自由度模型:输出理想质心
2. 控制策略:采用分层式直接横摆力矩控制
①上层:包括模型预测MPC,滑模控制SMC,PID控制,LQR控制,可灵活对四种控制器对比和选择
②下层:基于轮胎滑移率最优分配。四种控制均可跟踪横摆角速度和质心侧偏角期望值。
侧偏角和横摆角速度
具体内容包括:
1.纯simulink仿真模型(2018b版本及以上打开)
2.Word说明文档(七自由度建模、MPC模型预测、控制策略、矢量控制设计)57
3.初始化m文件
4.参考文档
电子设计资料不支持退款,拍前请三思哦~谢谢理解!好的资料仿真可以事半功倍!很值得用来快速学习,可以有助于您学习和理解!
点击“我想要”拍下即可哦,相关资料对您有帮助的,也可以赠送喔!
#3017资料