本文由 365源码网 – 17688411880 发布,转载请注明出处,如有问题请联系我们!Qt_CPP实现的,验证APA的规划和控制算法,主要涉及车辆

Qt/CPP实现的,验证APA的规划和控制算法,主要涉及车辆信息的解码与车辆控制、超声波的车位检测和障碍物定位、泊车轨迹规划和轨迹跟踪等。
软件功能说明:
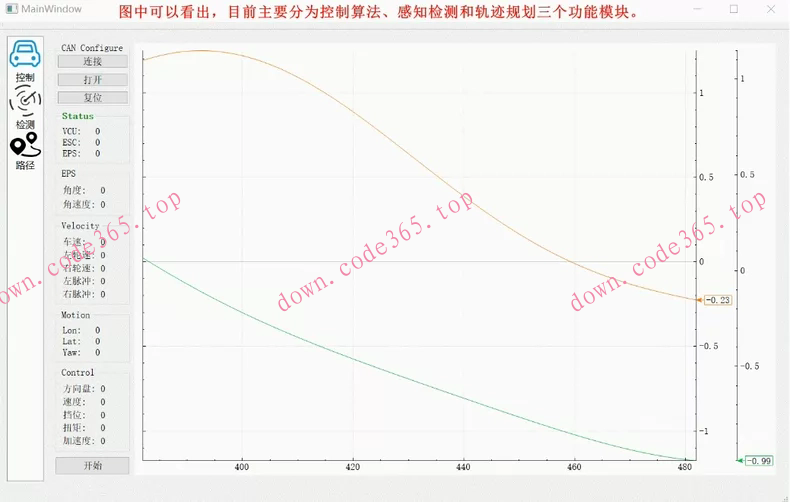
目前软件界面的功能划分。从图中可以看出,目前主要分为控制算法、感知检测和轨迹规划三个功能模块。
感知算法:
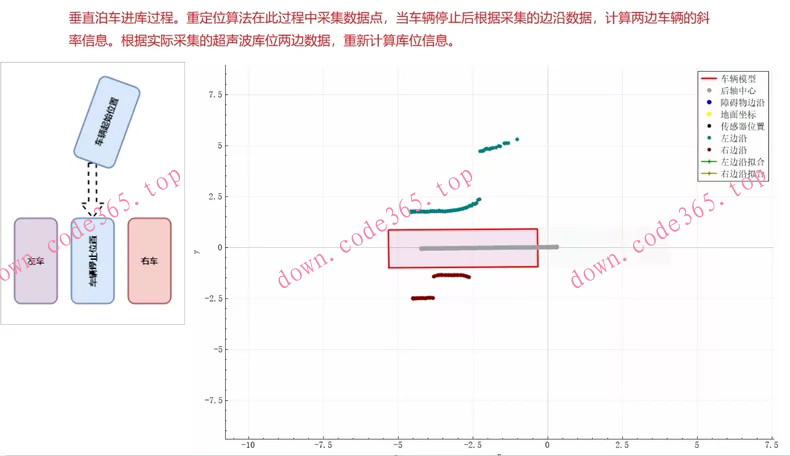
关于超声波的重定位算法采用三角定位数据和数据集的线段拟合算法,进行库位的重定位。垂直泊车入库过程中的重定位,垂直泊车入库过程。
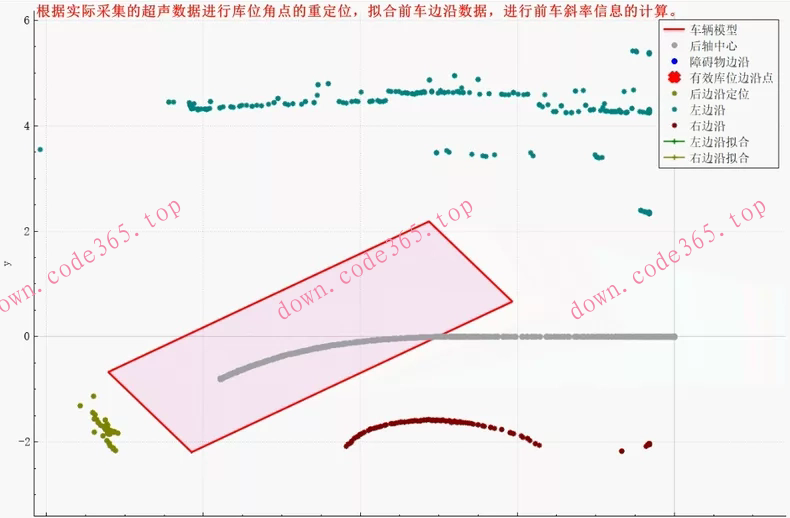
重定位算法在此过程中采集数据点,当车辆停止后根据采集的数据计算库位的外边沿角点,并拟合前车斜率信息。
根据实际采集的超声数据进行库位角点的重定位,拟合前车边沿数据,进行前车斜率信息的计算。
垂直泊车进库过程。重定位算法在此过程中采集数据点,当车辆停止后根据采集的边沿数据,计算两边车辆的斜率信息。
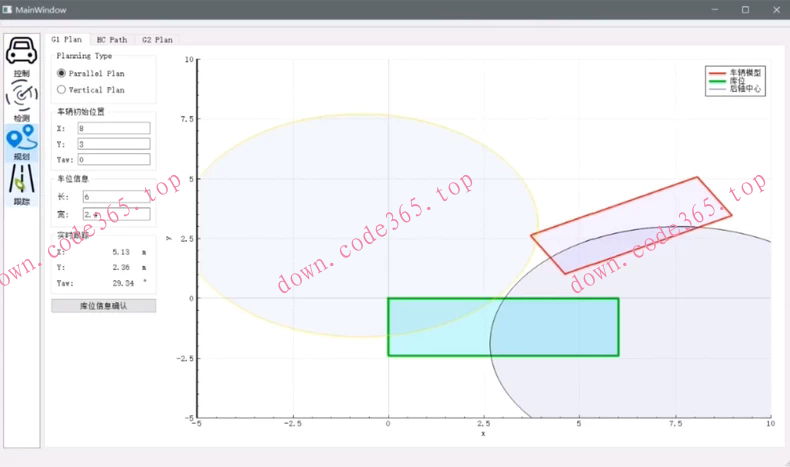
轨迹规划算法:平行规划,一次入库情况,多次尝试入库情况。
垂直规划:一次入库情况,多次尝试入库情况
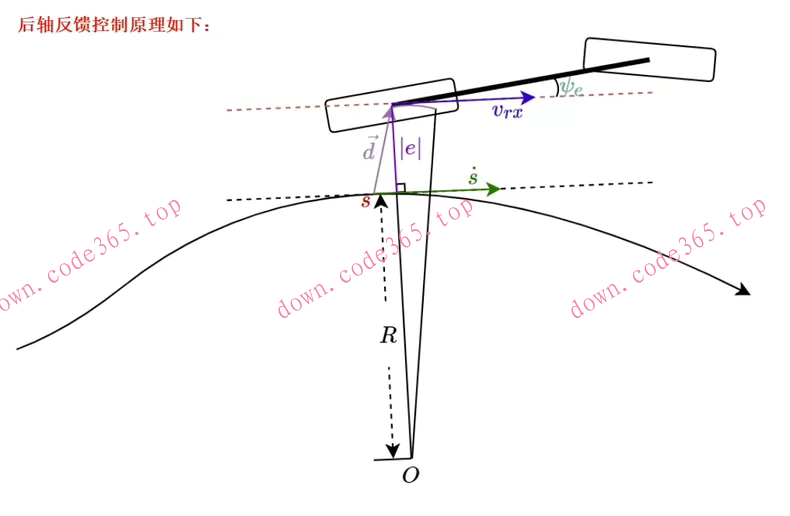
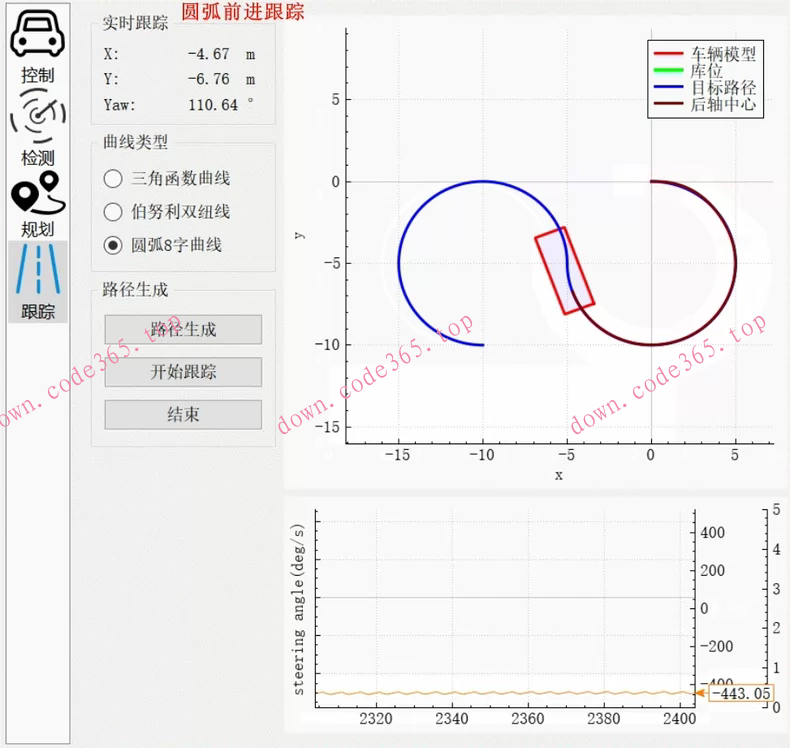
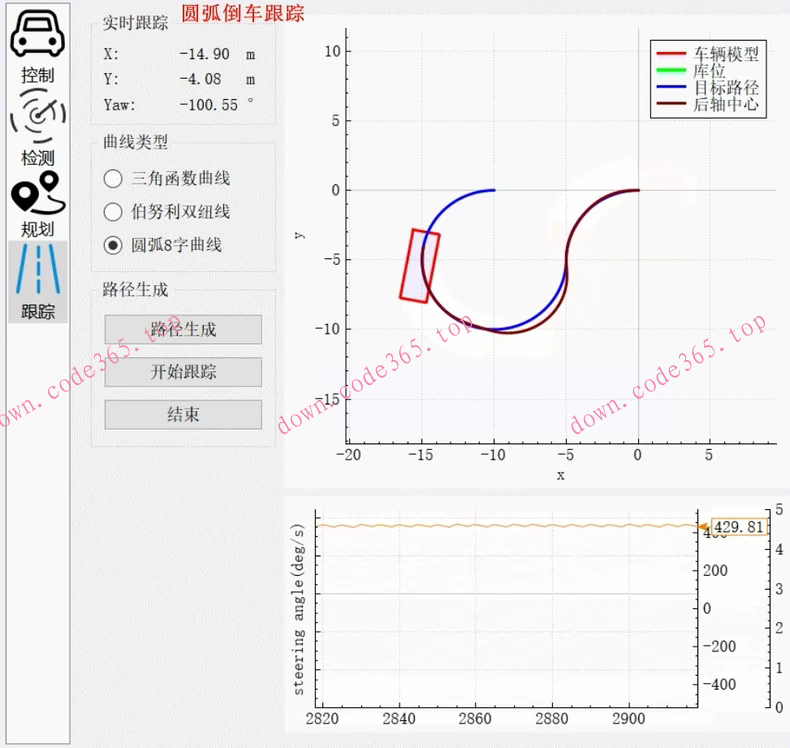
路径跟踪:路径跟踪算法主要分为基于几何、基于后轴、基于前轴和基于模型的优化控制算法。
eigen3.4.0开源库,直接包含.CPP/.h文件即可使用。Eigen3是一个开源的C++库,用于线性代数、矩阵计算和其他相关数学计算。Eigen3的名字来源于德语单词“eigen”,意为“自己的”,表示该库主要关注于C++编程。Eigen3的目标是提供一个高性能、易于使用且与C++标准库兼容的数学库。
源码:
使用Qt5.12.1_MinGW、Qt5.13.1_MinGW编译通过。
程序文件可复制,不支持退货,介意勿拍,更多项目请看主页。
o.40