本文由 365源码网 – 18522379162 发布,转载请注明出处,如有问题请联系我们!预测MPC分布式四轮独立驱动汽车稳定性控制

预测MPC分布式四轮独立驱动汽车稳定性控制
分布式四轮独立驱动汽车稳定性控制(参考文献+仿真模型)|||
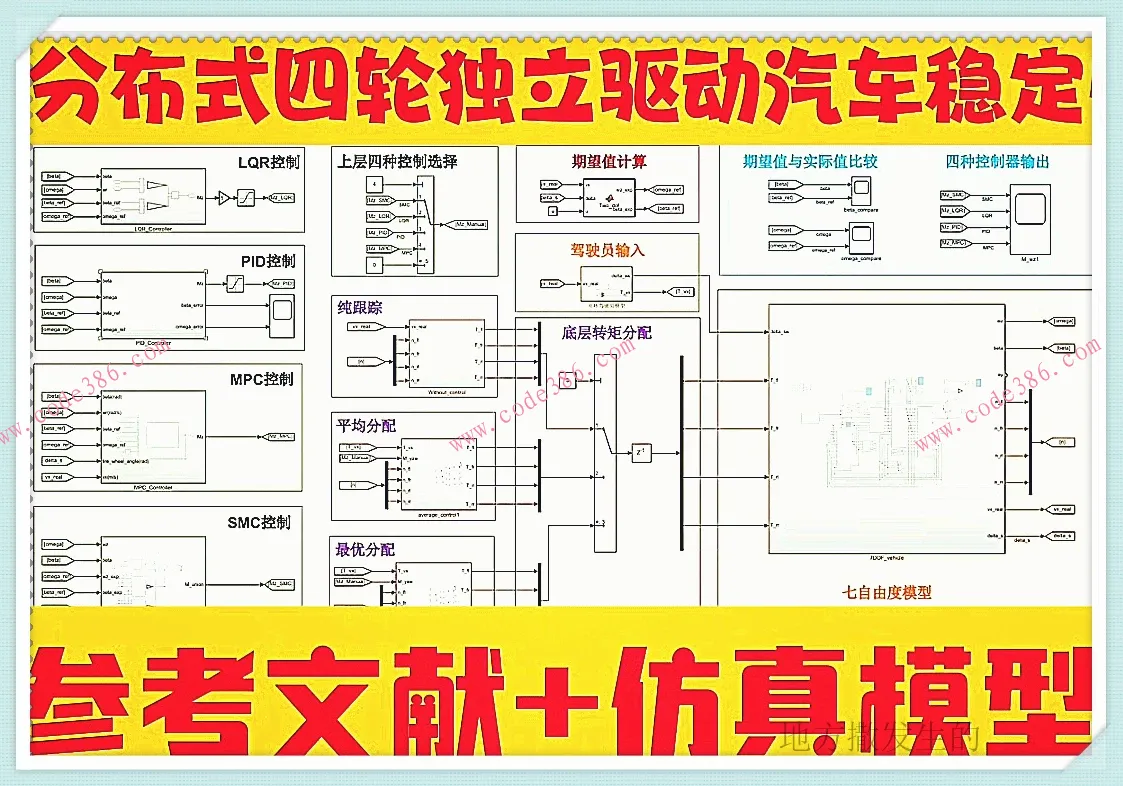
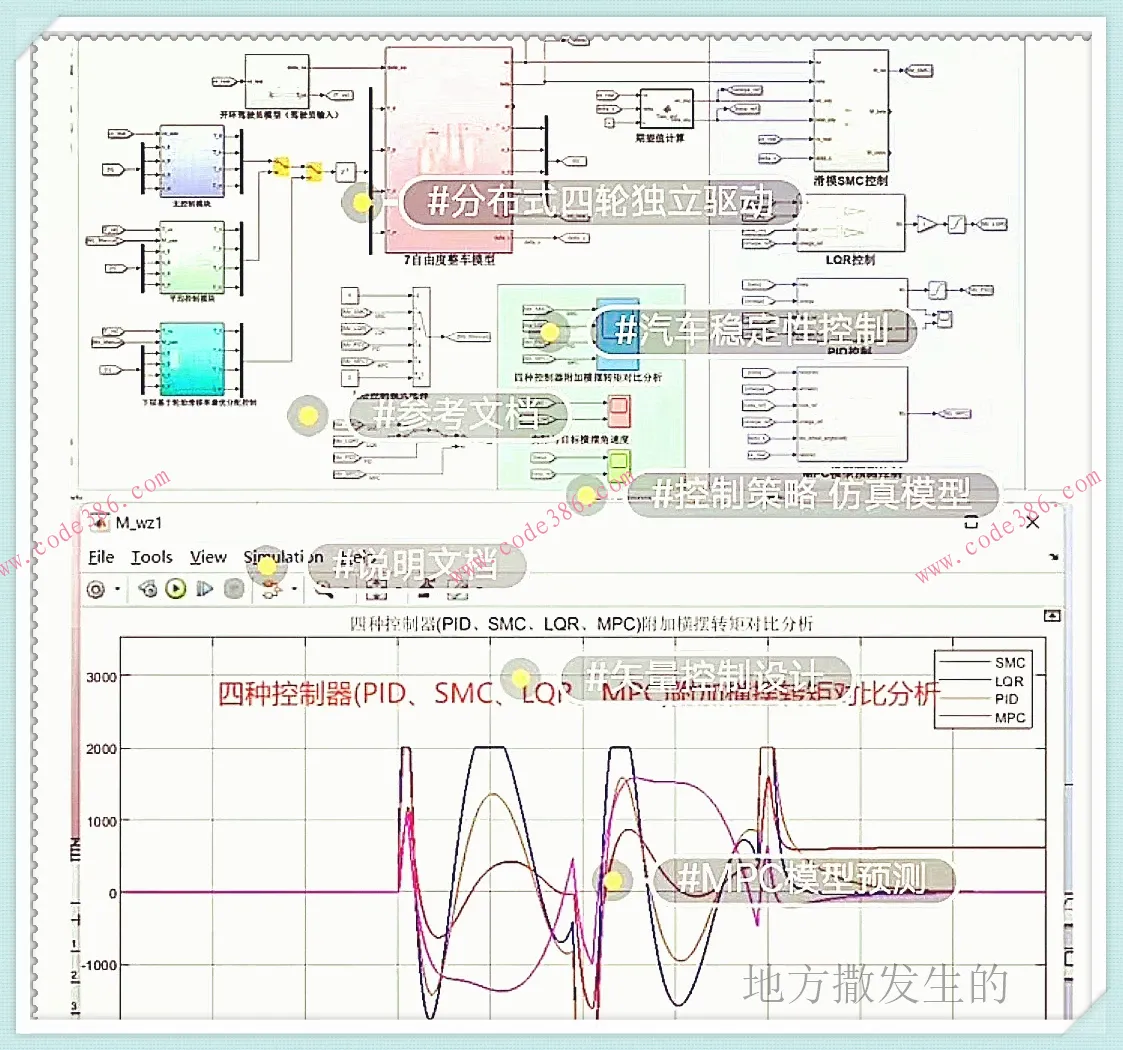
(1)控制策略:采用分层式直接横摆力矩控制
①上层:包括模型预测MPC,滑模控制SMC,PID控制,LQR控制,可灵活对四种控制器对比和选择
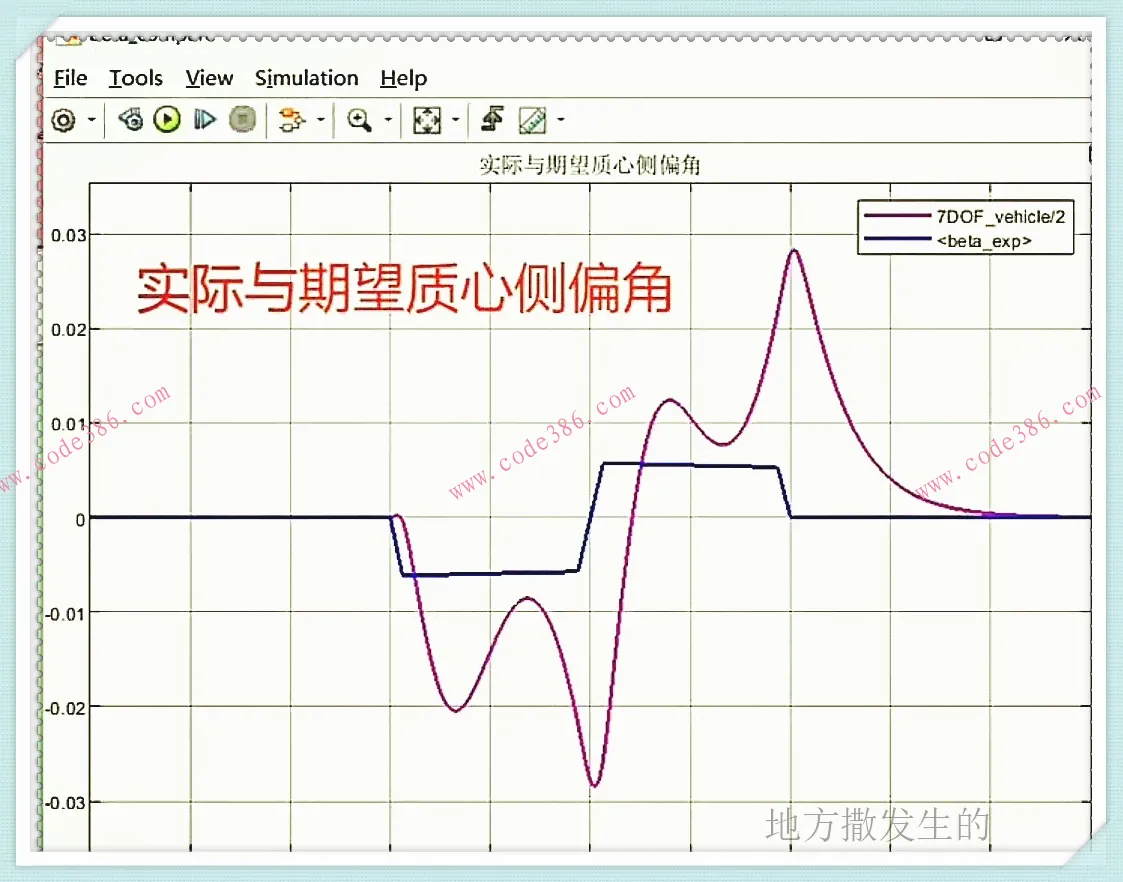
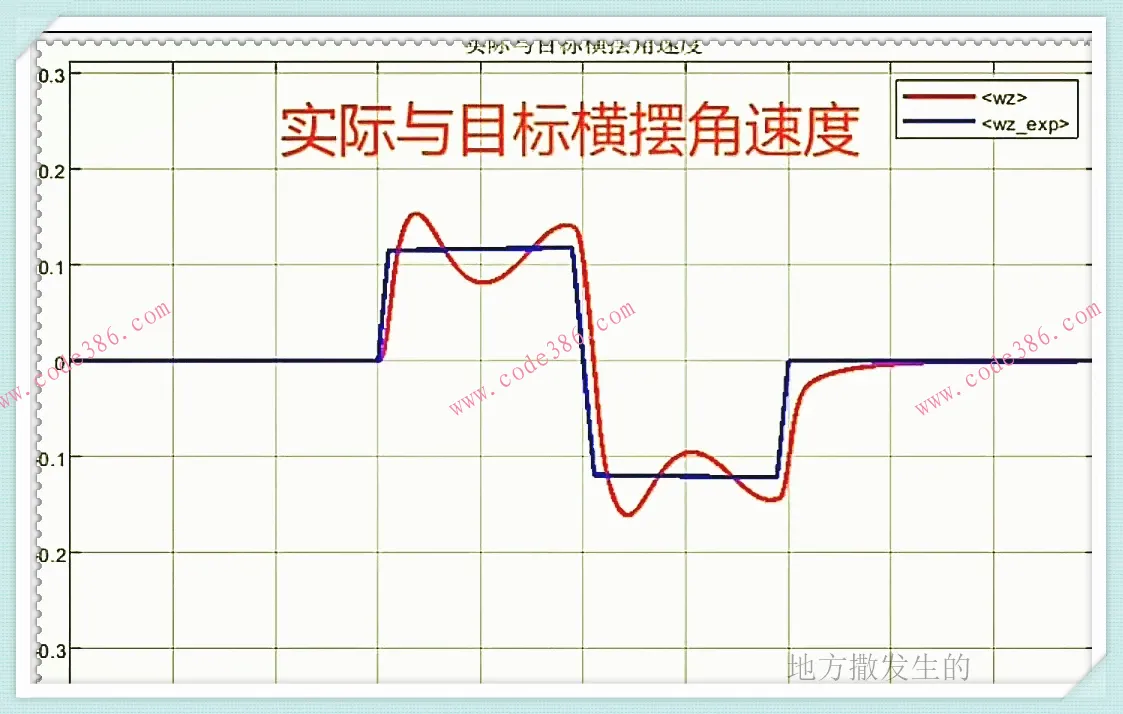
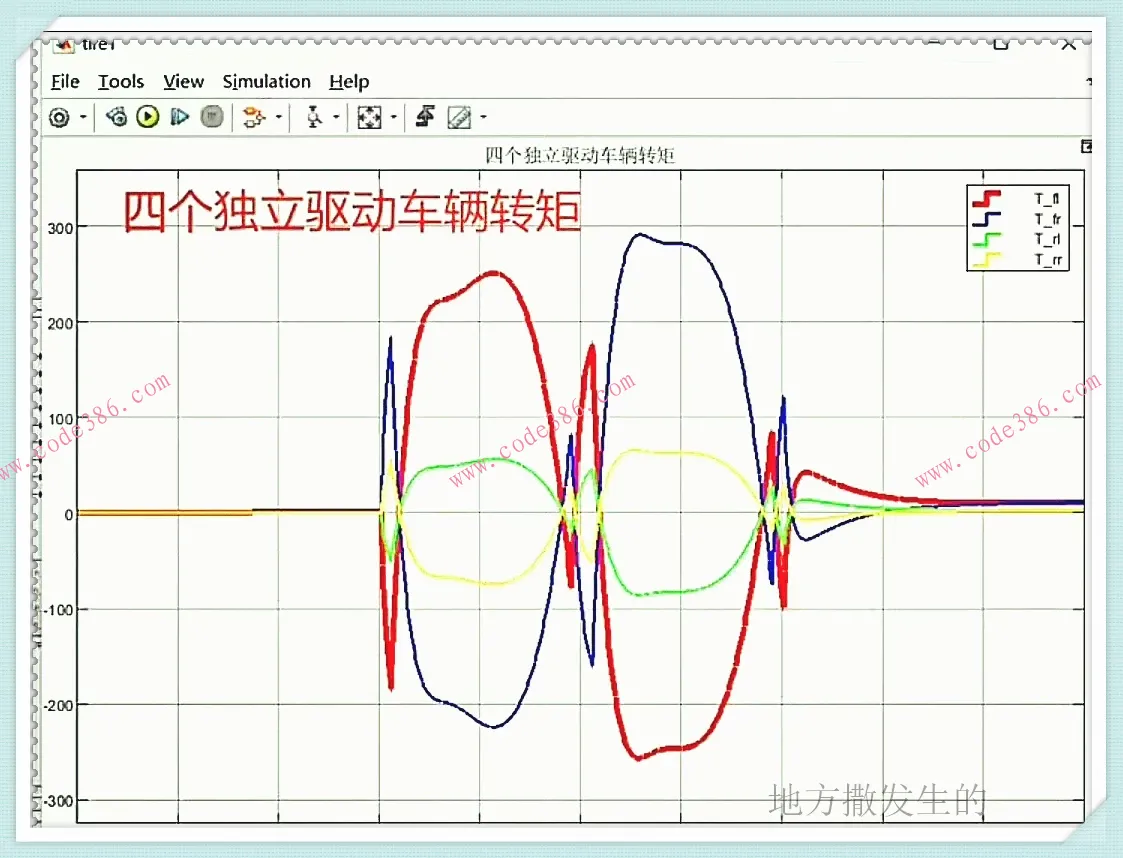
②下层:基于轮胎滑移率最优分配。四种控制均可跟踪横摆角速度和质心侧偏角期望值。
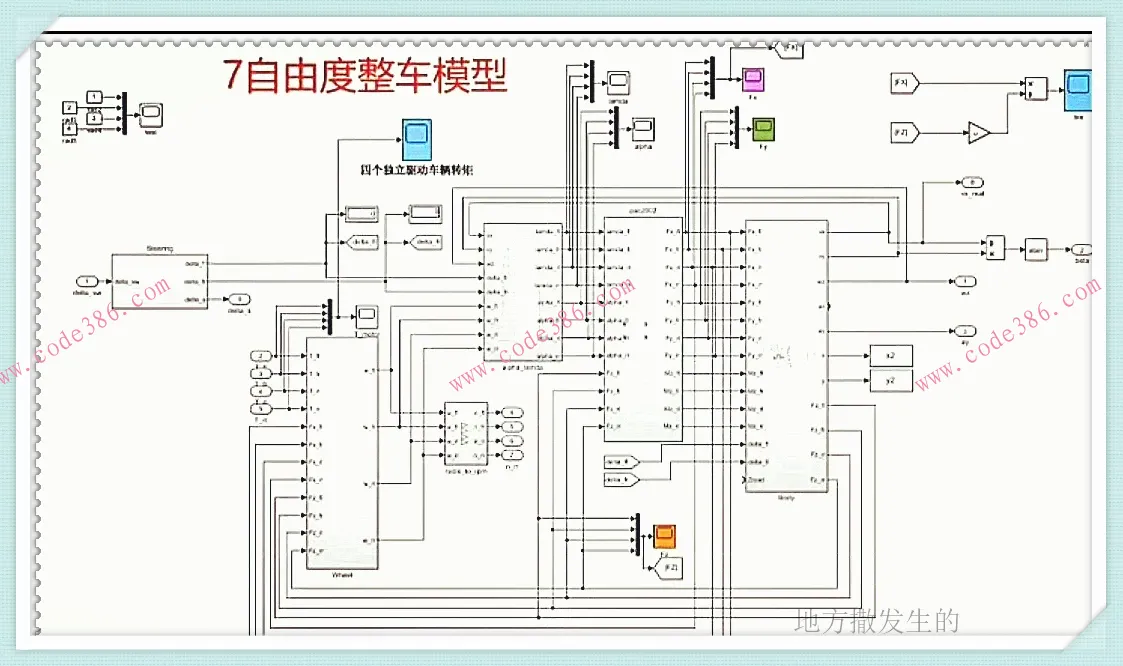
(2)车辆动力学模型
①七自由度整车模型:车辆被控对象采用七自由度整车模型输出实际质心侧偏角和横摆角速度,
②二自由度模型:输出理想质心侧偏角和横摆角速度。
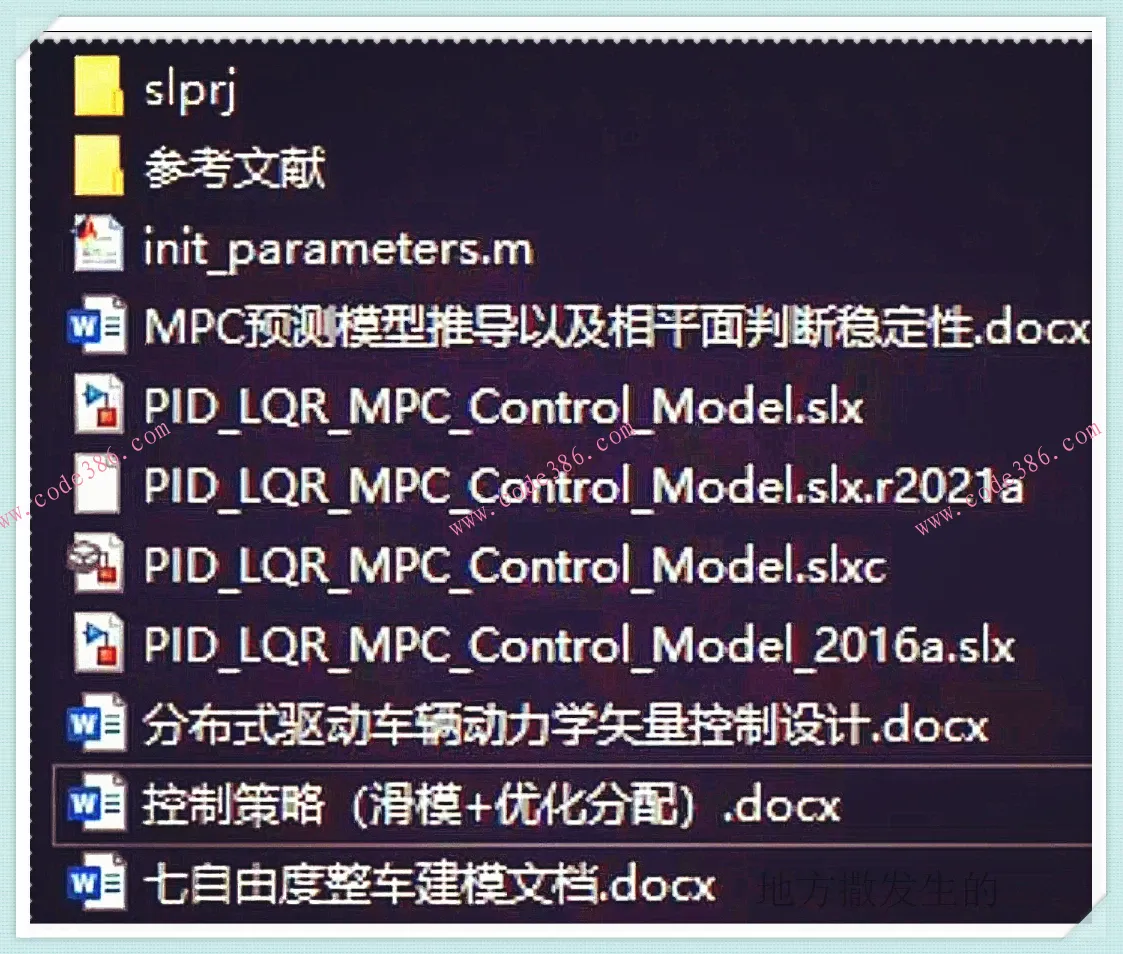
资料内容:
1.纯simulink仿真模型
2.附参考文献
3.初始化m文件
需要可咨询,另售出不退,无答疑
[号外][号外][号外][号外][火][火][火][火][火]