本文由 365源码网 – 18522379162 发布,转载请注明出处,如有问题请联系我们!分布式驱动车辆的控制及转矩轨迹跟踪与稳定性控制

分布式驱动车辆的控制及转矩轨迹跟踪与稳定性控制
电动车汽车分布式驱动电动汽车轨迹跟踪与稳定性控制
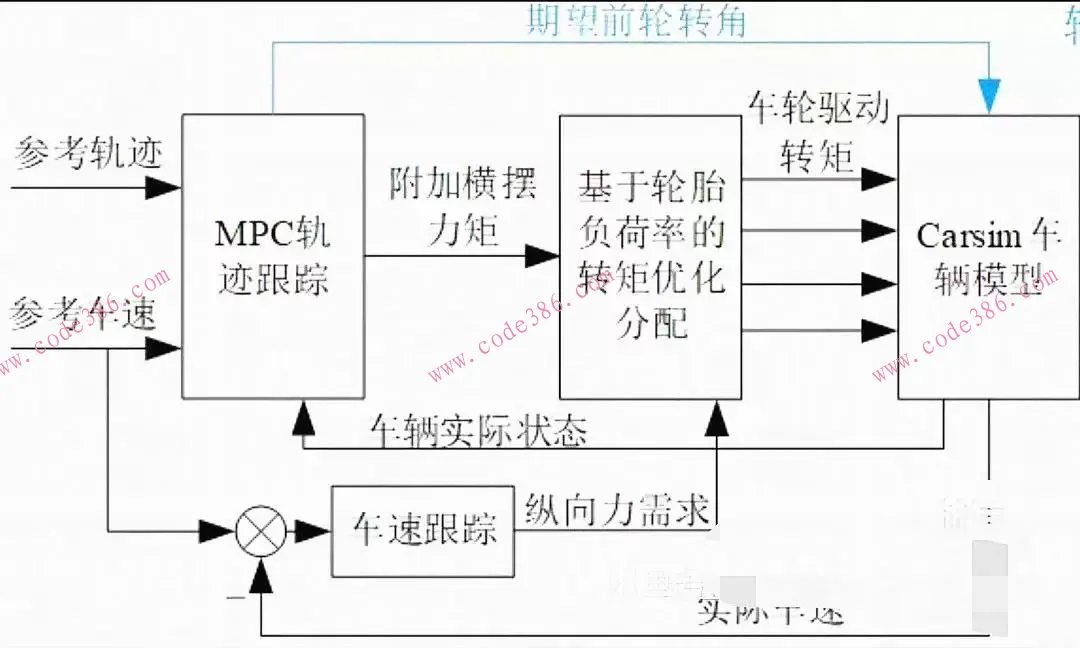
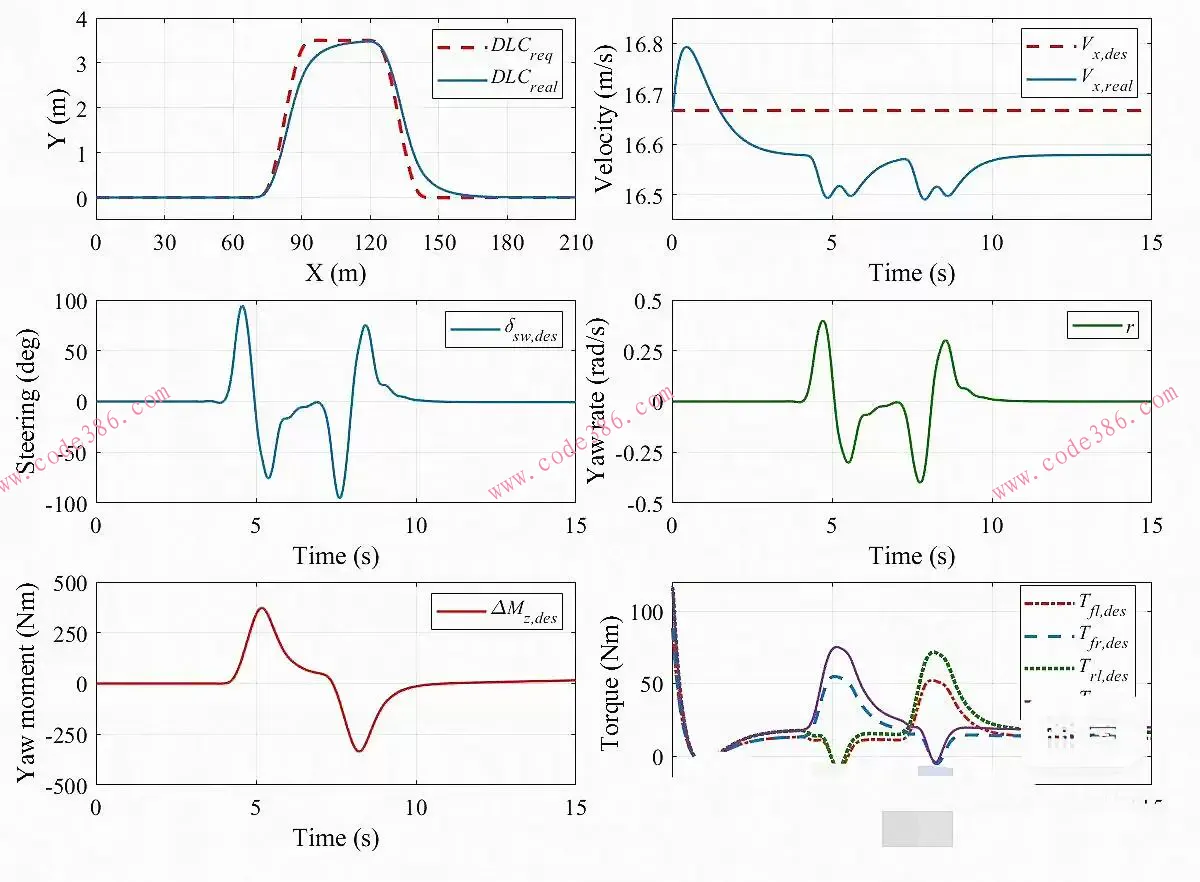
①控制器上层采用模型预测控制(MPC)决策出前轮转角(δ)和附加横摆力矩(ΔMz),实现对无人驾驶分布式电驱动车辆在双移线(DLC)变道场景下的轨迹跟踪控制与稳定性控制。
②控制器下层是基于二次规划(QP)的转矩优化分配。
③对于学习分布式驱动车辆的控制及转矩分配有很好的帮助效果。(此模型需要一定的软件应用基础,没有基础的小白慎拍)